6 DOF Teleoperated Robot Arm Controller

Project Description
This project was for a module called Making and Tinkering in NTU. We took inspiration from the Da Vinci Surgical Robot and we would like to see how far we could go doing them from scratch.
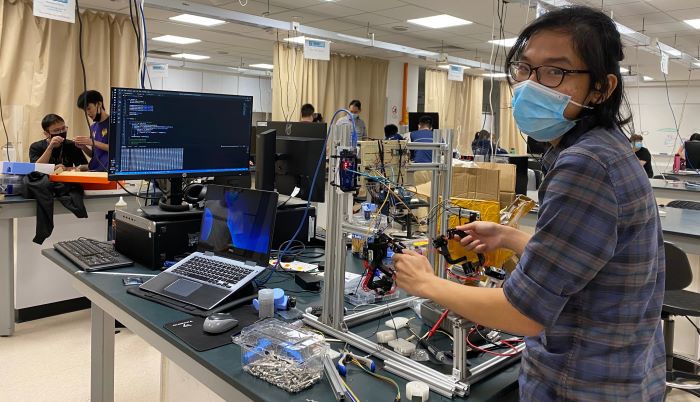
As we embarked on making a 6 DOF controller and a simple serial linkage robot arm with 6 servos, we learned serial linkage robot kinematics such as homogenous transformation, DH-Parameters and implement them with the help of the Robotics Toolbox Python by Dr Peter Corke from QUT.
We used the encoder readings at the joints and forward kinematics to deduce the tcp pose. Then inverse kinematics from the Robotics Toolbox library was used to get the joint angles of our simple 6-servo arm.
Of course we could not hack out anything comparable to the state-of-the-art, but by building things from scratch, we learn a lot about the integration of software and hardware in robotic systems.
Final video
Github
The Github Repository for the prototype codes
Comments powered by Disqus.