6 DOF Stewart Platform
Project Description
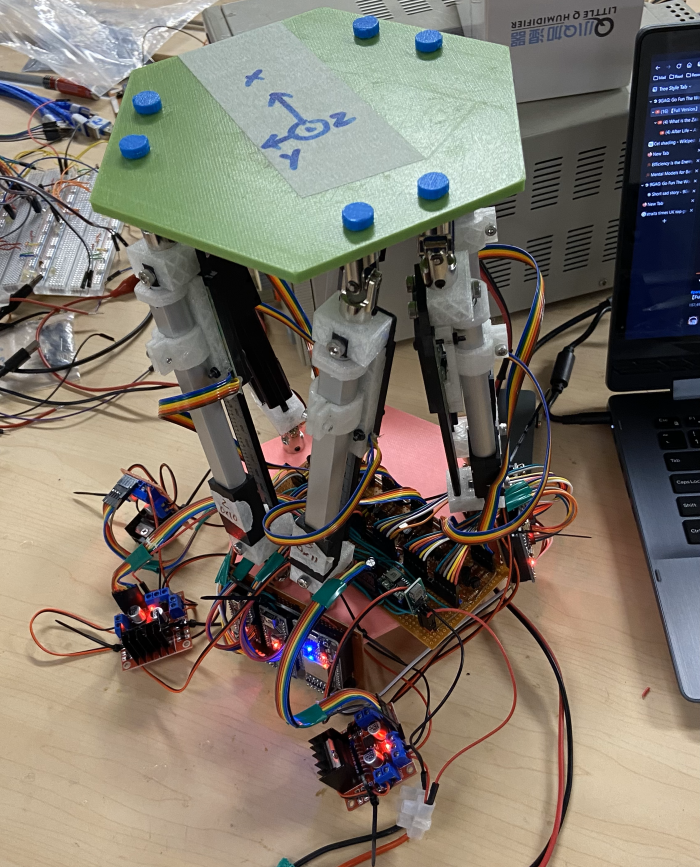
After the 6DOF Serial Linkage Robot project, I wanted to explore parallel linkage robots by building the 6DOF Stewart platform. Due to cost constraints, many people used rotary servo motors. However, that resulted in a limited range due to the limited space for the servo arm to move. I wanted to see if I could make the platform out of linear motors while keeping the cost down.
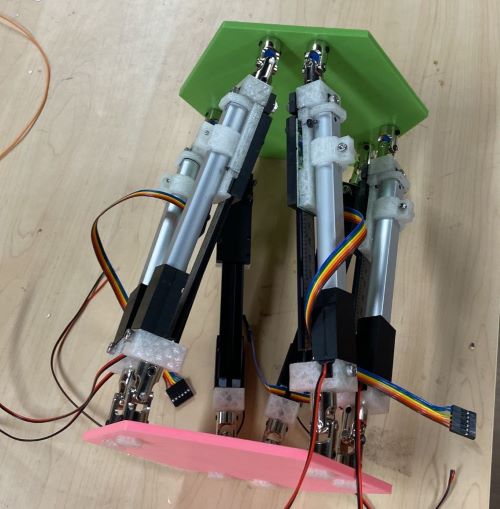
Encoded Linear Actuator
The cost of an encoded linear actuator is high, but a standard linear motor is affordable. I still needed to get the distance measurement for the control algorithm. How about using the digital vernier calipers!?
To read the distance measurements of the calipers, the digital signal from the PCB had to be processd in a micro-controller.
| Vernier calipers PCB | Analyze the signal from Oscilloscope (Logic Analyzer later on) |
 | 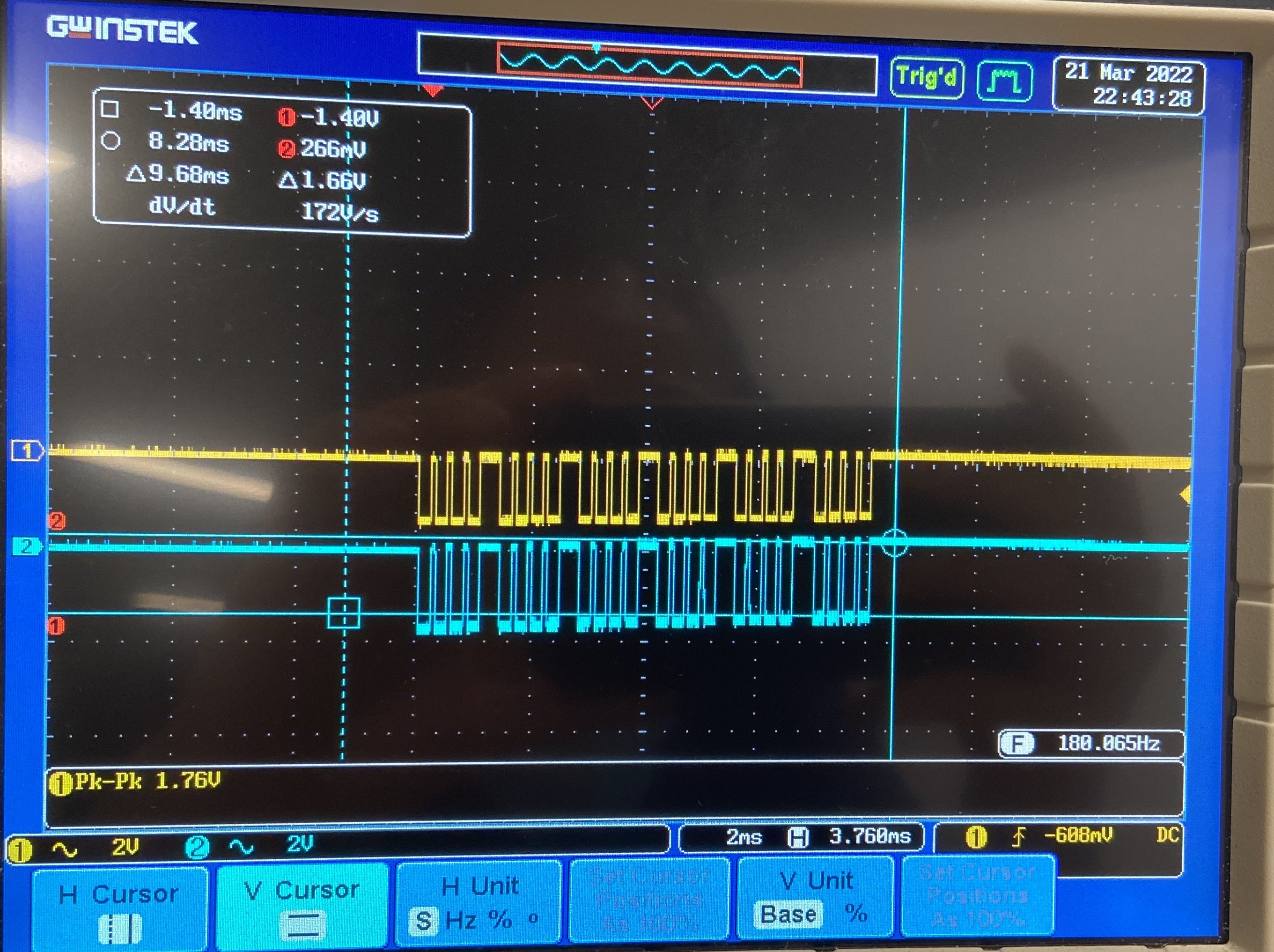 |
Motor Control
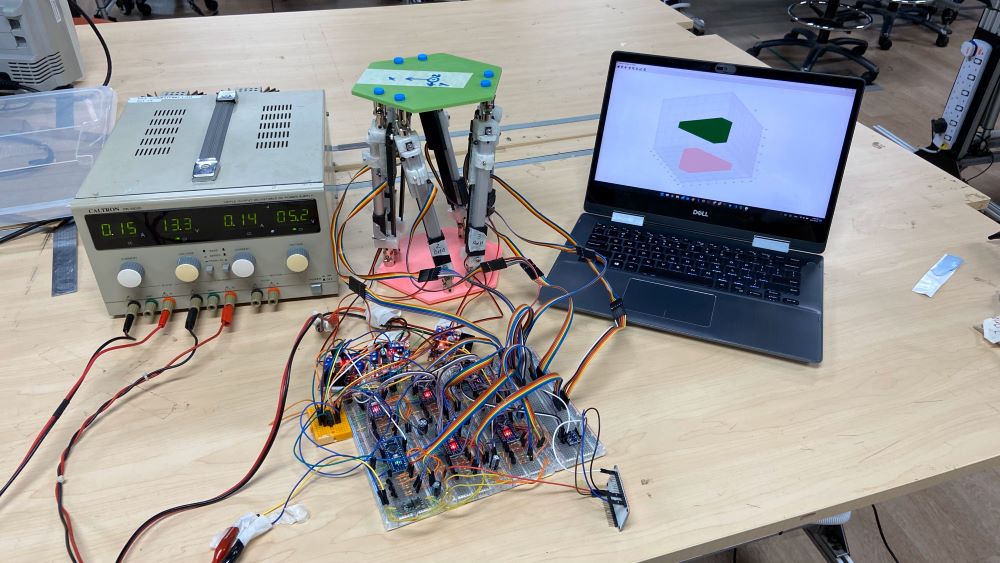
| Vernier calipers and linear actuator | 6 micro-controller PID control 6 motors |
 |
Pose Control
Cleaned up the messy prototyping breadboard
Implemented Bluetooth control to the master ESP32 and visualize using python matplotlib
Github
The Github Repository for the prototype codes
Comments powered by Disqus.